CarpetVR
Alexander Vakhitov, Andrew Starostin, Victor Lempitsky
CarpetVR is a system for realtime 6DoF virtual reality based on an arbitrary smartphone.
An inexpensive case turns smartphone to a stereo VR helmet. We use a neural net-designed marker to enable
fast and robust helmet pose estimation.
A case has a slanted mirror to make the smartphone cam look down. See carpetvr.com for details.
In the image above, a user enjoys the VR experience (bottom-left: renderings) in our system.
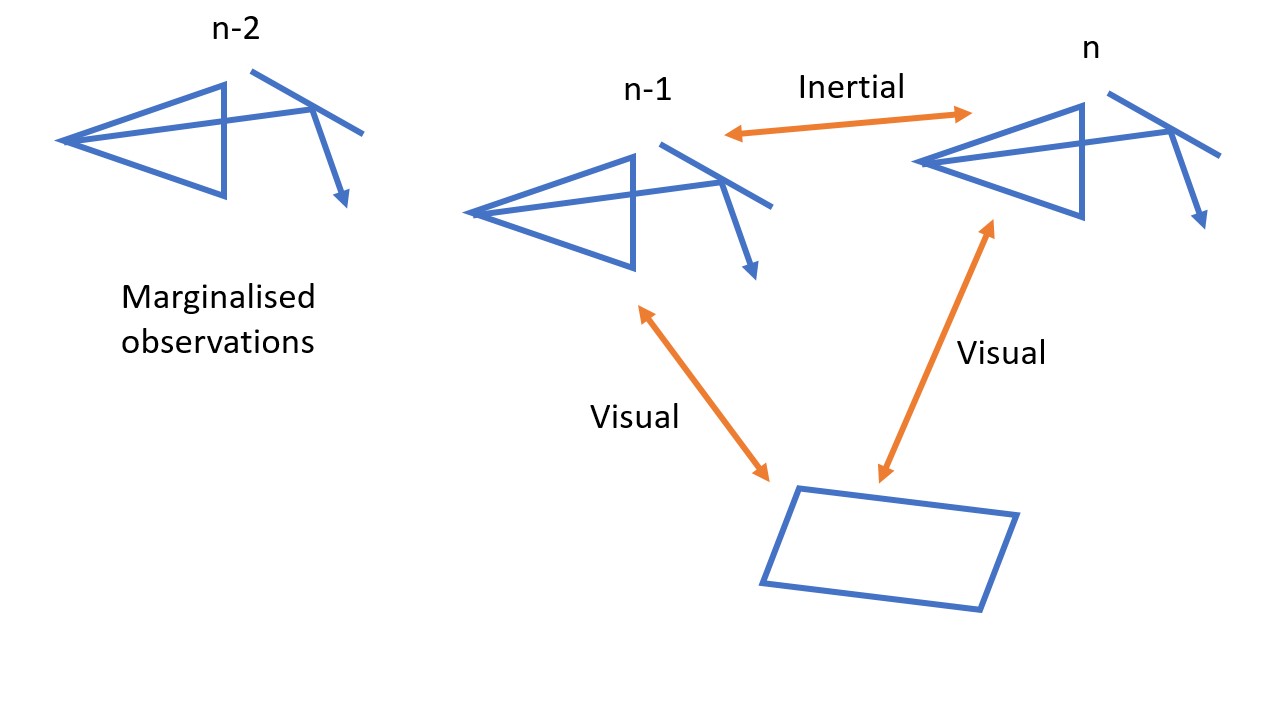
My role was to create a visual-inertial pose estimation algorithm. It optimizes the camera poses in a temporal window with inertial and visual constraints, while the previous poses are marginalized (see the schema). We start with estimating the visual pose from individual frames, and then use a MSCKF-like (Mourikis & Roumeliotis, 2007) nonlinear filter with inertial constraints. In the image above, we see the trajectory of a mirror-equipped camera. We marginalize the past observations (n-2 in the image) and use active observations (n-1, n) for visual-inertial pose estimation.
Main features
Tightly coupled visual-inertial pose estimation
60 FPS, System latency = IMU latency (2 ms)
Shaking-free motion trajectory generation
Paper
Although it was a comercially-focused startup project, we have published an overview paper:
Lempitsky, Victor and Vakhitov, Alexander and Starostin, Andrew CarpetVR: The Magic Carpet Meets the Magic Mirror, 2018 IEEE Conference on Virtual Reality and 3D User Interfaces (VR), 2018, pp. 1–1 bib