Visual SLAM with Lines and Points
Line segments are especially helpful for feature-based camera pose estimation in man-made environments with repetitive visual appearance and lack of unique texture.
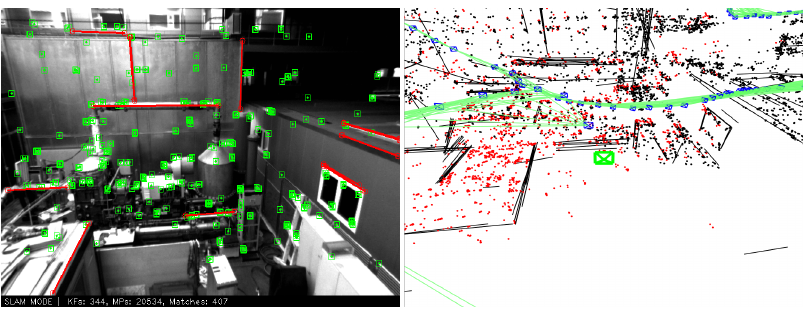
In this project, we created solvers for the absolute and relative camera pose as well as mono- and stereo SLAM systems based on the fusion of points and lines. We developed a deep SLAM-oriented descriptor for line segment matching.
Collaborators
Albert Pumarola, Jan Funke, Antonio Agudo, Victor Lempitsky, Yinqiang Zheng, Francesc Moreno-Noguer
Papers
Uncertainty-Aware Camera Pose Estimation from Points and Lines
Learnable Line Descriptor for Visual SLAM
Stereo relative pose from line and point feature triplets
PL-SLAM: Real-time Monocular Visual SLAM with Points and Lines
Accurate and Linear Time Pose Estimation from Points and Lines
Camera Pose and Focal Length Estimation Using Regularized Distance Constraints