Learnable Line Descriptor for Visual SLAM
IEEE Access, 2019
Alexander Vakhitov, Victor Lempitsky
Traditionally, indirect visual motion estimation and simultaneous localization and mapping (SLAM) systems were based on point features. In recent years, several SLAM systems that use lines as primitives were suggested. Despite the extra robustness and accuracy brought by line segment matching, the line segment descriptors used in such systems were hand-crafted and therefore sub-optimal.
In this work, we suggest to apply descriptor learning to construct line segment descriptors optimized for matching tasks. We show how such descriptors can be constructed on top of a deep yet lightweight fully-convolutional neural network. The coefficients of this network are trained using an automatically collected dataset of matching and non-matching line segments. The use of the fully-convolutional network ensures that the bulk of the computations needed to compute descriptors is shared among multiple line segments in the same image, enabling efficient implementation. We show that learned line segment descriptors outperform previously suggested hand-crafted line segment descriptors both in isolation (i.e. for the subtask of distinguishing matching and non-matching line segments), but also when built into the SLAM system. We construct a new line based SLAM pipeline built upon a state-of-the-art point-only system. We demonstrate generalization of the learned parameters of the descriptor network between two well-known datasets for autonomous driving and indoor micro aerial vehicle navigation.
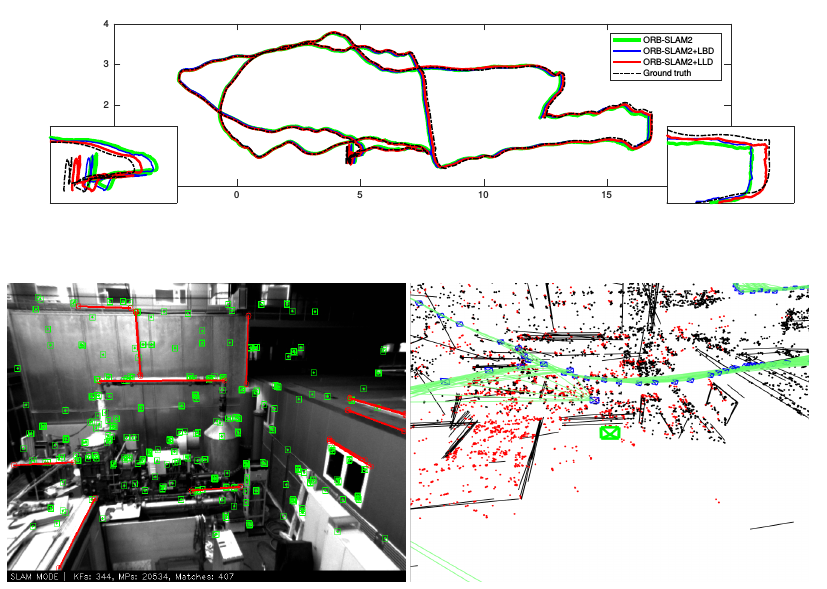 Top: EuRoC Track MH05, the trajectory ground truth projected on XZ plane, and the reconstructed trajectories by
different methods (each trajectory is rigidly aligned with the ground truth). The trajectory reconstructed by
the ORB-SLAM2+LLD (red) is closer to the ground truth trajectory (dashed black) demonstrating the advantage of the
proposed descriptor.
Bottom-left: feature tracking visualization in the ORB-SLAM2+LLD system for a single frame of the sequence.
Bottom-right: the map constructed by ORB-SLAM2+LLD system. The green frustum corresponds to the frame shown in the bottom-left; the blue frustums represent other frames of the reconstructed trajectory. Black lines show segments of 3D lines inserted into the map. Red (black) points correspond to the map points used (not used) in the local bundle adjustment.
Top: EuRoC Track MH05, the trajectory ground truth projected on XZ plane, and the reconstructed trajectories by
different methods (each trajectory is rigidly aligned with the ground truth). The trajectory reconstructed by
the ORB-SLAM2+LLD (red) is closer to the ground truth trajectory (dashed black) demonstrating the advantage of the
proposed descriptor.
Bottom-left: feature tracking visualization in the ORB-SLAM2+LLD system for a single frame of the sequence.
Bottom-right: the map constructed by ORB-SLAM2+LLD system. The green frustum corresponds to the frame shown in the bottom-left; the blue frustums represent other frames of the reconstructed trajectory. Black lines show segments of 3D lines inserted into the map. Red (black) points correspond to the map points used (not used) in the local bundle adjustment.
Code
LLD-based line matching in python
Line detection and description library
Paper
Vakhitov, Alexander and Lempitsky, Victor Learnable Line Segment Descriptor for Visual SLAM (2019), IEEE Access pdf bib